CARTE MULTIWII POUR QUADCOPTER
Voici un autre quadricopter mais celui la, équipé de capteurs de manette WII!

En effet ces capteurs de manettes WII sont composés de capteurs gyroscopiques et d'accéléromètres, qui en les combinant en font une centrale inertielle.
Cette carte est gérée par un microcontroleur Arduino 16mhz, le programme à l'intérieur est le multiwiiconfig1.9.
Afin de bien faire fonctionner cette carte, il vous faudra entrer dans le programme pour faire vos choix selon le nombre de moteurs utilisés, l'emplacement, les capteurs utilisés (suivant les références), pour régler tous les PID etc.....
Et oui il va falloir prendre connaissance du programme et décoder les lignes a utiliser.

Ces lignes ci-dessus indiquent la valeur minimale du manche en bas des gaz (je l'ai augmenté ainsi que le maxthrottle à 1980 pour gagner en puissance au niveau du Quad).
Ensuite choisir votre type de multicopter (tri,y4 y6 ....)
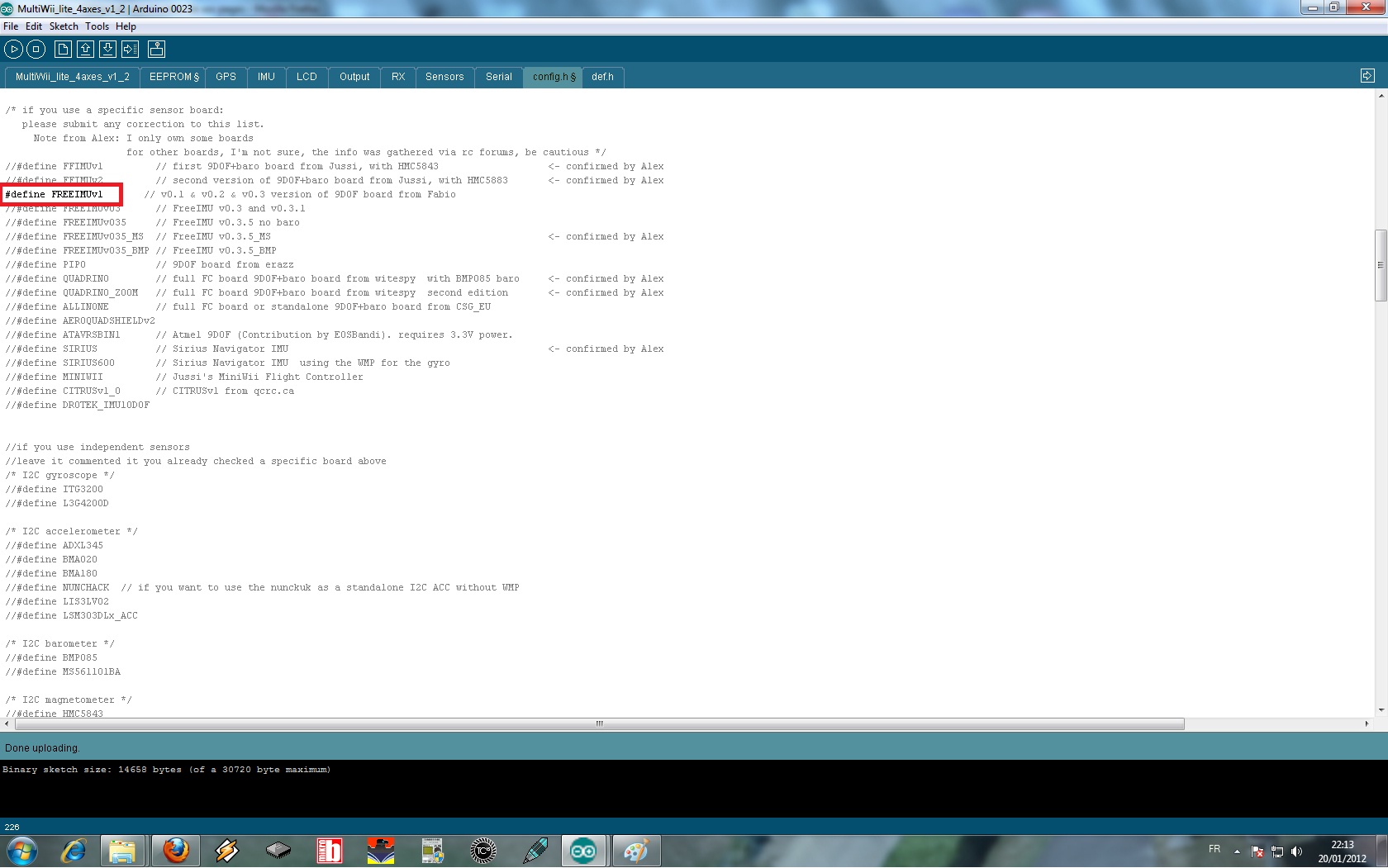
Choix du capteur : on trouve beaucoup de carte avec different type de capteurs (normalement la liste est assez complète)
Donc pour mon autre carte achetée dans le commerce (CARTE DE TYPE CRIUS) je fais le choix suivant.
Pour ma carte faite à partir de capteur WII (WIIMOTION ET NUNCHUCK) alors il faudra aller dans l'onglet SENSORS (normalement vous n'avait rien à changer sur le programme de base pour qu'il puisse dialoguer avec les capteurs), et oui les capteurs de console WII communique en I2C et chaque capteur a une adresse bien précise.
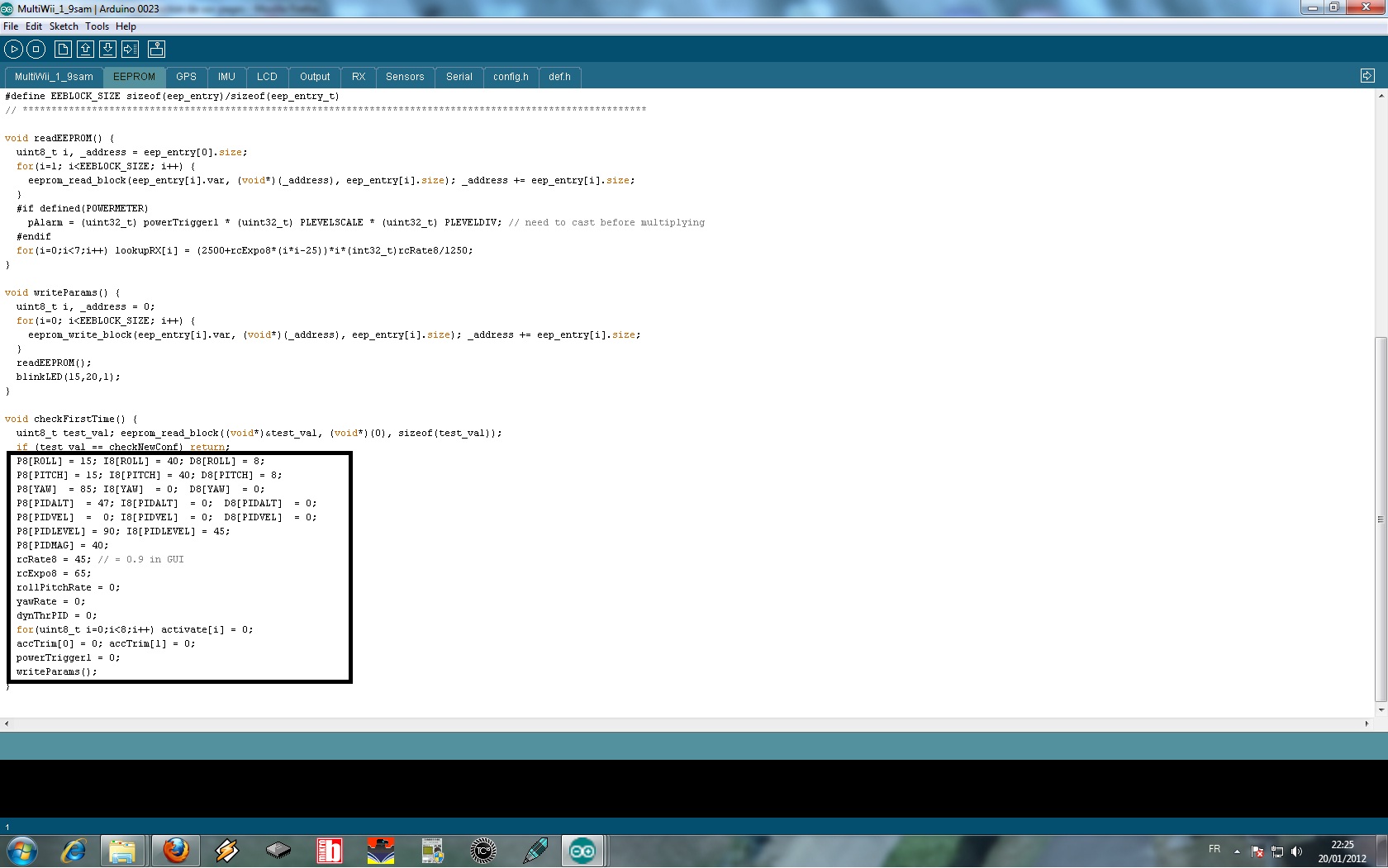
Pour ma part, pour régler les paramètres du PID (propotionnel Intégral Dérivé, je modifie ici les valeurs en remplacant :
if (test_val == checkNewConf) return;
par
if (test_val < checkNewConf) return;
Faire une écriture avec ce paramètre là et ensuite refaire une écriture avec la phrase de base :
if (test_val == checkNewConf) return;
Ceci afin qu'il prenne en compte les paramètres rentrés.
RAPPEL:
VOICI POUR FINIR UNE PETITE VIDEO :
En effet ces capteurs de manettes WII sont composés de capteurs gyroscopiques et d'accéléromètres, qui en les combinant en font une centrale inertielle.
Cette carte est gérée par un microcontroleur Arduino 16mhz, le programme à l'intérieur est le multiwiiconfig1.9.
Afin de bien faire fonctionner cette carte, il vous faudra entrer dans le programme pour faire vos choix selon le nombre de moteurs utilisés, l'emplacement, les capteurs utilisés (suivant les références), pour régler tous les PID etc.....
Et oui il va falloir prendre connaissance du programme et décoder les lignes a utiliser.
Ces lignes ci-dessus indiquent la valeur minimale du manche en bas des gaz (je l'ai augmenté ainsi que le maxthrottle à 1980 pour gagner en puissance au niveau du Quad).
Ensuite choisir votre type de multicopter (tri,y4 y6 ....)
Choix du capteur : on trouve beaucoup de carte avec different type de capteurs (normalement la liste est assez complète)
Donc pour mon autre carte achetée dans le commerce (CARTE DE TYPE CRIUS) je fais le choix suivant.
Pour ma carte faite à partir de capteur WII (WIIMOTION ET NUNCHUCK) alors il faudra aller dans l'onglet SENSORS (normalement vous n'avait rien à changer sur le programme de base pour qu'il puisse dialoguer avec les capteurs), et oui les capteurs de console WII communique en I2C et chaque capteur a une adresse bien précise.
Pour ma part, pour régler les paramètres du PID (propotionnel Intégral Dérivé, je modifie ici les valeurs en remplacant :
if (test_val == checkNewConf) return;
par
if (test_val < checkNewConf) return;
Faire une écriture avec ce paramètre là et ensuite refaire une écriture avec la phrase de base :
if (test_val == checkNewConf) return;
Ceci afin qu'il prenne en compte les paramètres rentrés.
RAPPEL:
Le PID est une correction , c'est-à-dire qu'elle agit à la sortie du comparateur, sur l'erreur. L'erreur est la différence entre la consigne et la mesure. Le correcteur PID agit de 3 manières :
- action Proportionnelle : l'erreur est multipliée par un gain G
- action Intégrale : l'erreur est intégrée et divisée par un gain Ti
- action Dérivée : l'erreur est dérivée et multipliée par un gain Td
VOICI POUR FINIR UNE PETITE VIDEO :